
































Маленькие помощники: как используют нанороботов в медицине
Читайте также

Медицина будущего: роботы-хирурги и умные таблетки
Иван Кудряшов
10.02.2024
18748
Радужные перспективы
Около 10 000 лет тому назад человек начал одомашнивать растения и животных. Сейчас наступило время одомашнивать молекулы.
Сьюзан Линдквист, молекулярный биолог

«Отец нанотехнологий» Эрик Дрекслер на форуме RusnanoTech 2011 года
В книге Эрика Дрекслера впервые прозвучал термин "наноробот«
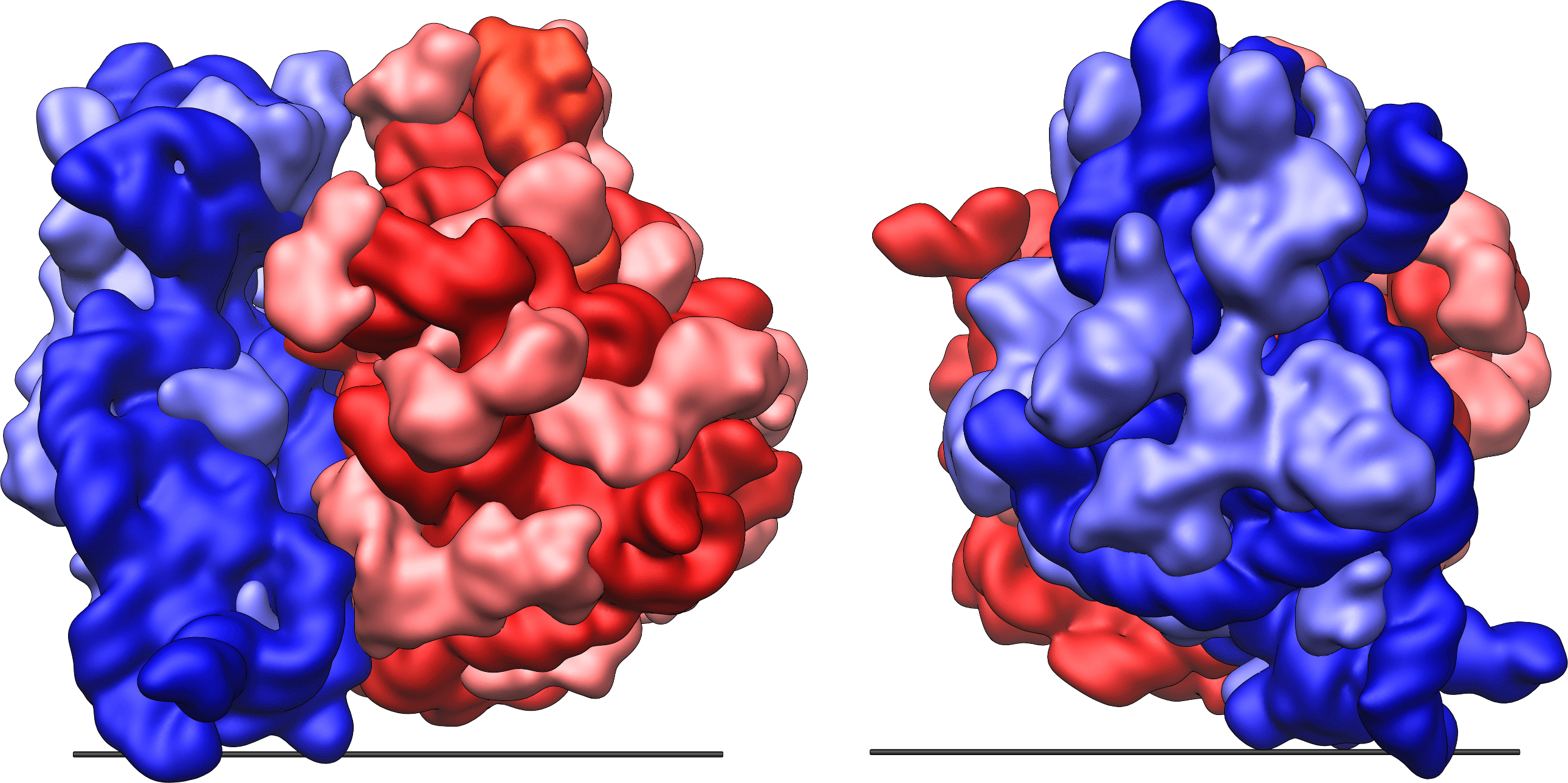
Модель рибосомы кишечной палочки. В некотором смысле рибосома — идеальный пример наноробота
Время прототипов
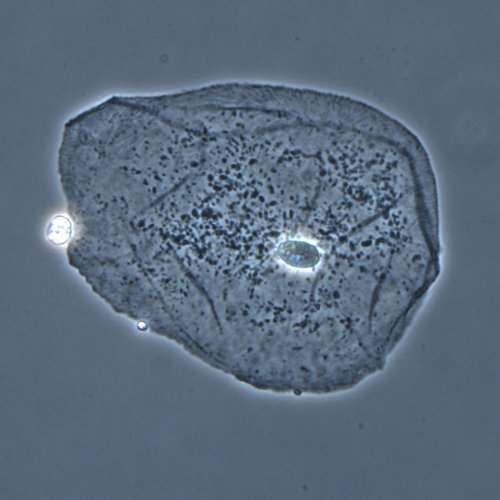
Если в роли наноробота выступит пусть и искусственно созданная, но всё же обычная клетка — с оболочкой, генетическим материалом, органеллами и цитоплазмой, — будет ли она считаться роботом или чем-то живым?
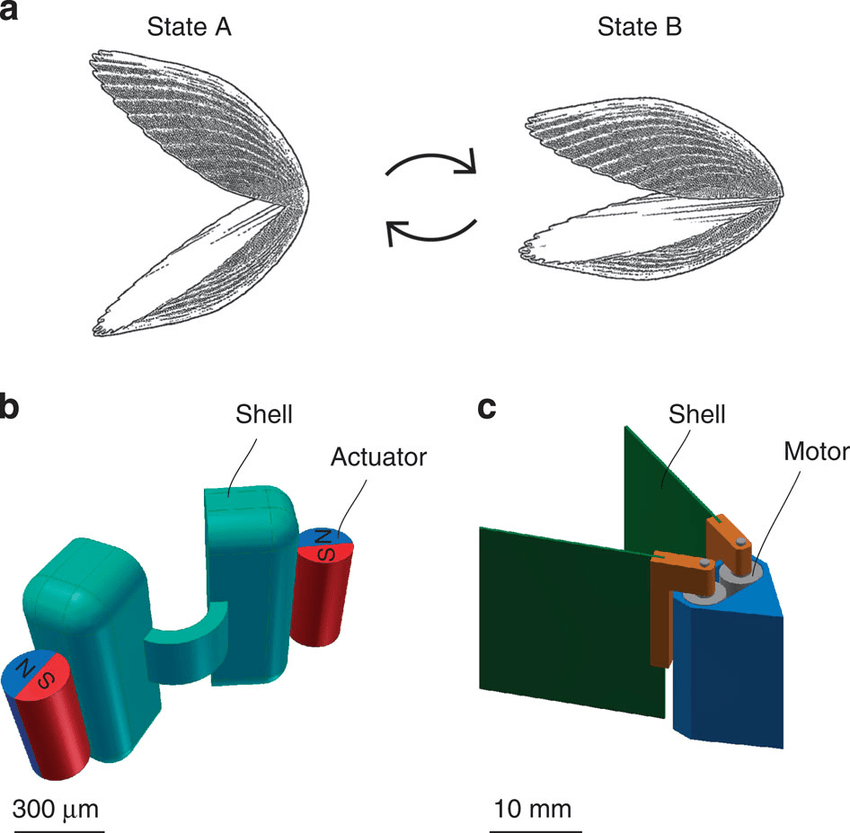
Схематичное изображение движения морского гребешка и 3D-модели робо-гребешка в нано- (b) и макровоплощении (c)
Внутренние барьеры
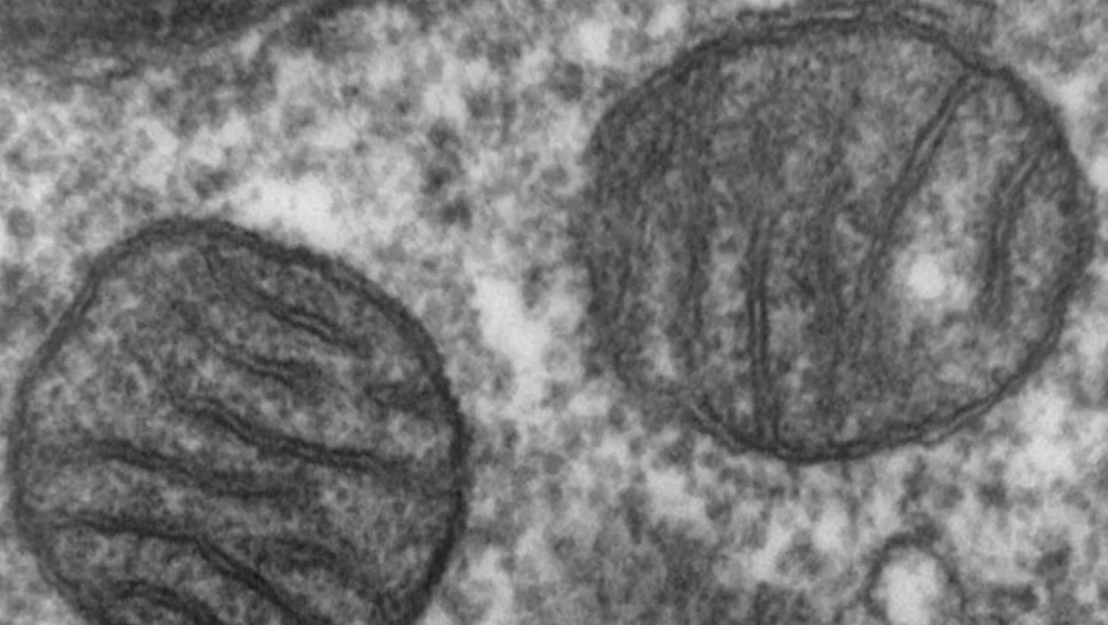
Митохондрия — энергетический центр клетки. Учёные думают снабжать нанороботов системой питания, похожей на ту, что действует в митохондриях

Отслеживание местоположения наноробота в организме с помощью таких приборов, как МРТ-аппарат, сложно приспособить к домашним условиям

Разрушительная сила роя микроскопических роботов может быть колоссальна
Читайте также

Современные киборги: как человек чинит, совершенствует и дополняет своё тело
Ярослав Бабкин
02.12.2023
21917
Читайте также

Самые страшные эпидемии, изменившие историю
Ирина Нечаева
08.02.2020
37891




Наука
Наука
Наука

Наука

Наука

Наука

Наука
Наука
Наука

Наука