














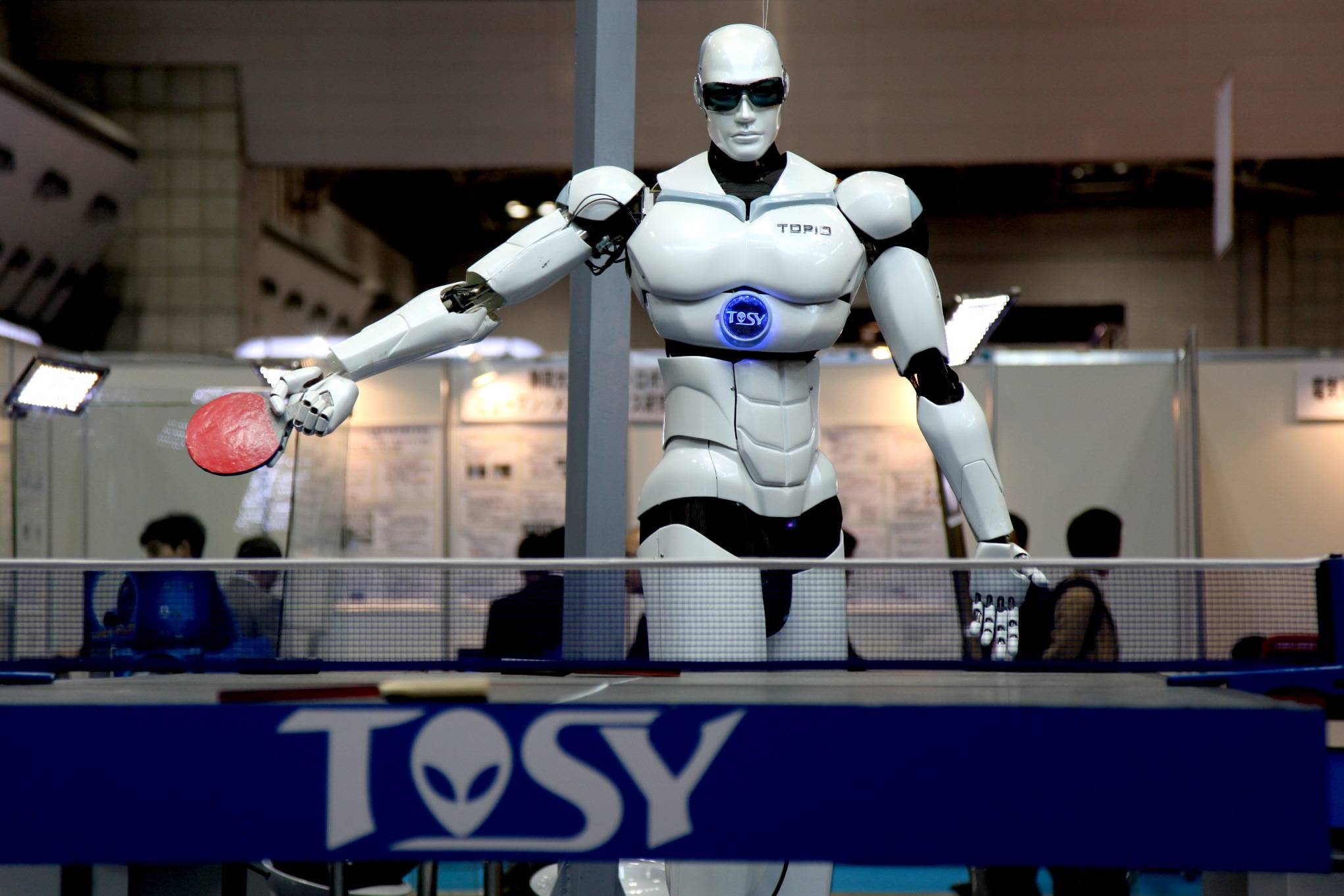
















Компания Boston Dynamics, производящая экспериментальных роботов, научила свои машины паркуру. В новом видео показано, как два человекоподобных робота марки Atlas проходят полосу препятствий, как заправские спортсмены.
На то, чтобы научить машины трюкам, ушло несколько месяцев подготовки. Роботы бегают по лестницам и наклонным поверхностям, прыгают и даже делают сальто назад.
Кликни,
чтобы посмотреть видео
Почему-то с IP адресов других стран ничего не тормозит
Человекоподобные интересны с двух точек зрения. Во-первых, они передают наше представление о роботе будущего, который везде пройдёт, всё сделает. Может, для конкретной задачи они и не подходят лучше всего, но если создавать единую платформу, способную выполнять много разных физических задач, то мы уже знаем, что человеческий форм-фактор на это способен.Подробнее о создании Atlas и их задачах можно посмотреть в этом «закулисном» видео (осторожно, английский!)
Скотт Куиндерсма, глава подразделения Atlas
Кликни,
чтобы посмотреть видео
Почему-то с IP адресов других стран ничего не тормозит




Статьи

Новости

Джордж Мартин намекнул на фильм по Elden Ring
Новости

Для «Смуты» анонсировали большое дополнение про казака Киршу
Пока без даты релиза.
Новости

Слух: в TES 6 появятся морские сражения и строительство кораблей в духе Starfield
Игру могут показать в июле 2025-го.
Новости

Marvel заморозила сразу три супергеройских сериала
Официально шоу не получили зеленый свет от Marvel.
Новости

«Аватар» получит сиквел — про мага Земли
Всего будет 26 эпизодов
Новости

По «Хроникам Нарнии» могут снять восемь фильмов
Об этом обмолвился глава IMAX.
Новости

«Разделение» стало самым просматриваемым сериалом в Apple TV+
Шоу обогнало «Теда Лассо»
Новости

Джордж Мартин мог закончить цикл книг «Колесо времени» вместо Брэндона Сандерсона
Но выбор вдовы Роберта Джордана все-таки пал на Сандерсона, который на тот момент еще не был так популярен.
Новости

Первый тизер хоррора «Верни ее назад» от A24
Выйдет 30 мая
Новости

Сооснователь Riot надеется, что MMO по League of Legends выйдет раньше, чем люди окажутся на Марсе
Это его любимый проект

Показать ещё